- Number Charts
- Multiplication
- Long division
- Basic operations
- Telling time
- Place value
- Roman numerals
- Fractions & related
- Add, subtract, multiply, and divide fractions
- Mixed numbers vs. fractions
- Equivalent fractions
- Prime factorization & factors
- Fraction Calculator
- Decimals & Percent
- Add, subtract, multiply, and divide decimals
- Fractions to decimals
- Percents to decimals
- Percentage of a number
- Percent word problems
- Classify triangles
- Classify quadrilaterals
- Circle worksheets
- Area & perimeter of rectangles
- Area of triangles & polygons
- Coordinate grid, including moves & reflections
- Volume & surface area
- Pre-algebra
- Square Roots
- Order of operations
- Scientific notation
- Proportions
- Ratio word problems
- Write expressions
- Evaluate expressions
- Simplify expressions
- Linear equations
- Linear inequalities
- Graphing & slope
- Equation calculator
- Equation editor
- Elementary Math Games
- Addition and subtraction
- Math facts practice
- The four operations
- Factoring and number theory
- Geometry topics
- Middle/High School
- Statistics & Graphs
- Probability
- Trigonometry
- Logic and proof
- For all levels
- Favorite math puzzles
- Favorite challenging puzzles
- Math in real world
- Problem solving & projects
- For gifted children
- Math history
- Math games and fun websites
- Interactive math tutorials
- Math help & online tutoring
- Assessment, review & test prep
- Online math curricula
Worksheets for simplifying expressions
Worksheets for evaluating expressions with variables
Worksheets for writing expressions with variables from verbal expressions
Worksheets for linear inequalities


Key to Algebra Workbooks
Key to Algebra offers a unique, proven way to introduce algebra to your students. New concepts are explained in simple language, and examples are easy to follow. Word problems relate algebra to familiar situations, helping students to understand abstract concepts. Students develop understanding by solving equations and inequalities intuitively before formal solutions are introduced. Students begin their study of algebra in Books 1-4 using only integers. Books 5-7 introduce rational numbers and expressions. Books 8-10 extend coverage to the real number system.

- school Campus Bookshelves
- menu_book Bookshelves
- perm_media Learning Objects
- login Login
- how_to_reg Request Instructor Account
- hub Instructor Commons
Margin Size
- Download Page (PDF)
- Download Full Book (PDF)
- Periodic Table
- Physics Constants
- Scientific Calculator
- Reference & Cite
- Tools expand_more
- Readability
selected template will load here
This action is not available.
8.E: Solving Linear Equations (Exercises)
- Last updated
- Save as PDF
- Page ID 5024

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
8.1 - Solve Equations using the Subtraction and Addition Properties of Equality
In the following exercises, determine whether the given number is a solution to the equation.
- x + 16 = 31, x = 15
- w − 8 = 5, w = 3
- −9n = 45, n = 54
- 4a = 72, a = 18
In the following exercises, solve the equation using the Subtraction Property of Equality.
- y + 2 = −6
- a + \(\dfrac{1}{3} = \dfrac{5}{3}\)
- n + 3.6 = 5.1
In the following exercises, solve the equation using the Addition Property of Equality.
- u − 7 = 10
- x − 9 = −4
- c − \(\dfrac{3}{11} = \dfrac{9}{11}\)
- p − 4.8 = 14
In the following exercises, solve the equation.
- n − 12 = 32
- y + 16 = −9
- f + \(\dfrac{2}{3}\) = 4
- d − 3.9 = 8.2
- y + 8 − 15 = −3
- 7x + 10 − 6x + 3 = 5
- 6(n − 1) − 5n = −14
- 8(3p + 5) − 23(p − 1) = 35
In the following exercises, translate each English sentence into an algebraic equation and then solve it.
- The sum of −6 and m is 25.
- Four less than n is 13.
In the following exercises, translate into an algebraic equation and solve.
- Rochelle’s daughter is 11 years old. Her son is 3 years younger. How old is her son?
- Tan weighs 146 pounds. Minh weighs 15 pounds more than Tan. How much does Minh weigh?
- Peter paid $9.75 to go to the movies, which was $46.25 less than he paid to go to a concert. How much did he pay for the concert?
- Elissa earned $152.84 this week, which was $21.65 more than she earned last week. How much did she earn last week?
8.2 - Solve Equations using the Division and Multiplication Properties of Equality
In the following exercises, solve each equation using the Division Property of Equality.
- 13a = −65
- 0.25p = 5.25
- −y = 4
In the following exercises, solve each equation using the Multiplication Property of Equality.
- \(\dfrac{n}{6}\) = 18
- y −10 = 30
- 36 = \(\dfrac{3}{4}\)x
- \(\dfrac{5}{8} u = \dfrac{15}{16}\)
In the following exercises, solve each equation.
- −18m = −72
- \(\dfrac{c}{9}\) = 36
- 0.45x = 6.75
- \(\dfrac{11}{12} = \dfrac{2}{3} y\)
- 5r − 3r + 9r = 35 − 2
- 24x + 8x − 11x = −7−14
8.3 - Solve Equations with Variables and Constants on Both Sides
In the following exercises, solve the equations with constants on both sides.
- 8p + 7 = 47
- 10w − 5 = 65
- 3x + 19 = −47
- 32 = −4 − 9n
In the following exercises, solve the equations with variables on both sides.
- 7y = 6y − 13
- 5a + 21 = 2a
- k = −6k − 35
- 4x − \(\dfrac{3}{8}\) = 3x
In the following exercises, solve the equations with constants and variables on both sides.
- 12x − 9 = 3x + 45
- 5n − 20 = −7n − 80
- 4u + 16 = −19 − u
- \(\dfrac{5}{8} c\) − 4 = \(\dfrac{3}{8} c\) + 4
In the following exercises, solve each linear equation using the general strategy.
- 6(x + 6) = 24
- 9(2p − 5) = 72
- −(s + 4) = 18
- 8 + 3(n − 9) = 17
- 23 − 3(y − 7) = 8
- \(\dfrac{1}{3}\)(6m + 21) = m − 7
- 8(r − 2) = 6(r + 10)
- 5 + 7(2 − 5x) = 2(9x + 1) − (13x − 57)
- 4(3.5y + 0.25) = 365
- 0.25(q − 8) = 0.1(q + 7)
8.4 - Solve Equations with Fraction or Decimal Coefficients
In the following exercises, solve each equation by clearing the fractions.
- \(\dfrac{2}{5} n − \dfrac{1}{10} = \dfrac{7}{10}\)
- \(\dfrac{1}{3} x + \dfrac{1}{5} x = 8\)
- \(\dfrac{3}{4} a − \dfrac{1}{3} = \dfrac{1}{2} a + \dfrac{5}{6}\)
- \(\dfrac{1}{2}\)(k + 3) = \(\dfrac{1}{3}\)(k + 16)
In the following exercises, solve each equation by clearing the decimals.
- 0.8x − 0.3 = 0.7x + 0.2
- 0.36u + 2.55 = 0.41u + 6.8
- 0.6p − 1.9 = 0.78p + 1.7
- 0.10d + 0.05(d − 4) = 2.05
PRACTICE TEST
- \(\dfrac{23}{5}\)
- n − 18 = 31
- 4y − 8 = 16
- −8x − 15 + 9x − 1 = −21
- −15a = 120
- \(\dfrac{2}{3}\)x = 6
- x + 3.8 = 8.2
- 10y = −5y + 60
- 8n + 2 = 6n + 12
- 9m − 2 − 4m + m = 42 − 8
- −5(2x + 1) = 45
- −(d + 9) = 23
- 2(6x + 5) − 8 = −22
- 8(3a + 5) − 7(4a − 3) = 20 − 3a
- \(\dfrac{1}{4} p + \dfrac{1}{3} = \dfrac{1}{2}\)
- 0.1d + 0.25(d + 8) = 4.1
- Translate and solve: The difference of twice x and 4 is 16.
- Samuel paid $25.82 for gas this week, which was $3.47 less than he paid last week. How much did he pay last week?
Contributors and Attributions
Lynn Marecek (Santa Ana College) and MaryAnne Anthony-Smith (Formerly of Santa Ana College). This content is licensed under Creative Commons Attribution License v4.0 "Download for free at http://cnx.org/contents/[email protected] ."
A zeroing feedback gradient-based neural dynamics model for solving dynamic quadratic programming problems with linear equation constraints in finite time
- Original Article
- Published: 27 May 2024
Cite this article

- Shangfeng Du 1 ,
- Dongyang Fu ORCID: orcid.org/0000-0003-0426-4356 1 ,
- Long Jin 2 ,
- Yang Si 1 &
- Yongze Li 1
30 Accesses
Explore all metrics
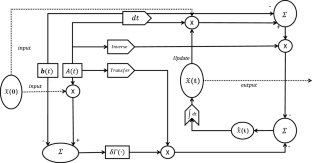
Gradient-based neural dynamics (GND) models are a classical algorithm for solving optimization problems, but it has non-negligible flaws in solving dynamic problems. In this study, a novel GND model, namely the zeroing feedback gradient-based neural dynamics (ZF-GND) models, is proposed based on the original GND model for tracking down the exact solution of dynamic quadratic programming problem (DQP). Further, a nonlinear projection function is designed to accelerate the convergence of the model. An upper bound on the convergence time of the ZF-GND model is rigorously defined through theoretical analysis. The superior effect of the ZF-GND model in terms of convergence is verified through comparison experiments. Finally, an application of robot motion planning is introduced to verify the practicality of the ZF-GND model.
This is a preview of subscription content, log in via an institution to check access.
Access this article
Price includes VAT (Russian Federation)
Instant access to the full article PDF.
Rent this article via DeepDyve
Institutional subscriptions
Data availability
The data that support the findings this study are available from the corresponding author upon reasonable request.
Mattingley J, Boyd S (2010) Real-Time convex optimization in signal processing. IEEE Signal Process Mag 27(3):50–61
Article Google Scholar
Jiang C, Xiao X, Liu D, Huang H, Xiao H, Lu H (2021) Nonconvex and bound constraint zeroing neural network for solving time-varying complex-valued quadratic programming problem. IEEE Trans Ind Informat 17(10):6864–6874
Liao-McPherson D, Huang M, Kolmanovsky I (2019) A regularized and smoothed fischer-burmeister method for quadratic programming with applications to model predictive control. IEEE Trans Autom Control 64(7):2937–2944
Article MathSciNet Google Scholar
Wang G, Hao Z, Huang H, Zhang B (2023) A proportional-integral iterative algorithm for time-variant equality-constrained quadratic programming problem with applications. Artif Intell Rev 56:4535–4556
Fu D, Huang H, Xiao X, Xia L, Jin L (2022) A generalized complex-valued constrained energy minimization scheme for the arctic sea ice extraction aided with neural algorithm. IEEE Trans Geosci Remote Sens 60(4303017):1–17
Google Scholar
Minet J, Taboury J, Goudail F, Pèalat M, Roux N, Lonnoy J, Ferrec Y (2011) Influence of band selection and target estimation error on the performance of the matched filter in hyperspectral imaging. Appl Opt 50(22):4276–4285
Manolakis D, Lockwood R, Cooley T, Jacobson J (2009) Hyperspectral detection algorithms: use covariances or subspaces? Proc. SPIE 7457, Imaging Spectrometry XIV, Aug
Si Y, Wang D, Chou Y, Fu D (2023) Non-convex activated zeroing neural network model for solving time-varying nonlinear minimization problems with finite-time convergence, Knowl.-Based Syst., vol. 274, Aug
Yaǧmur N, Alagöz BB (2019) Comparision of solutions of numerical gradient descent method and continous time gradient descent dynamics and lyapunov stability. In: Proceedings on 2019 27th signal processing and communications applications conference (SIU), pp. 1–4
Li W, Swetits J (1993) A Newton method for convex regression, data smoothing, and quadratic programming with bounded constraints. SIAM J Optim 3(3):466–488
Liu M, Chen L, Du X, Jin L, Shang M (2023) Activated gradients for deep neural networks. IEEE Trans Neural Netw Learn Syst 34(4):2156–2168
Plevris V, Papadrakakis M (2010) A hybrid particle swarm?gradient algorithm for global structural optimization. Comput-Aided Civ Infrastruct Eng 26(1):48–68
Andrei N (2014) An accelerated subspace minimization three-term conjugate gradient algorithm for unconstrained optimization. Numer. Algor. 65:859–874
Wang F, Jian J, Wang C (2014) A model-hybrid approach for unconstrained optimization problems. Numer Algor 66:741–759
Mathews JH, Fink KD (2004) Numerical Methods using MATLAB., Englewood Cliffs, NJ, USA: Prentice-Hall
Zhang Y, Jiang D, Wang J (2002) A recurrent neural network for solving sylvester equation with time-varying coefficients. IEEE Trans Neural Netw 13(5):1053–1063
Sun B, Cao Y, Guo Z, Yan Z, Wen S (2020) Synchronization of discrete-time recurrent neural networks with time-varying delays via quantized sliding mode control. Appl Math Comput 375:125093
MathSciNet Google Scholar
Zhang X, Chen L, Li S, Stanimirović P, Zhang J, Jin L (2021) Design and analysis of recurrent neural network models with non-linear activation functions for solving time-varying quadratic programming problems. CAAI Trans Intell Technol 6(4):394–404
Jia C, Kong D, Du L (2022) Recursive terminal Sliding-Mode control method for nonlinear system based on double hidden layer fuzzy emotional recurrent neural network. IEEE Access 10:118012–118023
Zhang Z, Zheng L, Yu J, Li Y, Yu Z (2017) Three recurrent neural networks and three numerical methods for solving a repetitive motion planning scheme of redundant robot manipulators. IEEE / ASME Trans Mechatr 22(3):1423–1434
Zhang Y, Wang J (2001) Recurrent neural networks for nonlinear output regulation. Automatica 37:1161–1173
Chen D, Zhang Y (2018) Robust zeroing neural-dynamics and its time-varying disturbances suppression model applied to mobile robot manipulators. IEEE Trans Neural Netw Learn Syst 29(9):4385–4397
Wang G, Li Q, Liu S, Xiao H, Zhang B (2022) New zeroing neural network with finite-time convergence for dynamic complex-value linear equation and its applications. Chaos Soliton Fractal 164:112674
Chen D, Li S, Wu Q (2021) A novel supertwisting zeroing neural network with application to mobile robot manipulators. IEEE Trans Neural Netw Learn Syst 32(4):1776–1787
Shi Y, Sheng W, Li S, Li B, Sun X (2023) Neurodynamics for equality-constrained time-variant nonlinear optimization using discretization. IEEE Trans Ind Inf. https://doi.org/10.1109/TII.2023.3290187
Shi Y, Wang J, Li S, Li B, Sun X (2023) Tracking control of cable-driven planar robot based on discrete-time recurrent neural network with immediate discretization method. IEEE Trans Ind Inf 19(6):7414–7423
Shi Y, Zhao W, Li S, Li B, Sun X (2023) Novel discrete-time recurrent neural network for robot manipulator: a direct discretization technical route. IEEE Trans Neural Netw Learn Syst 34(6):2781–2790
Shi Y, Jin L, Li S, Li J, Qiang J, Gerontitis DK (2022) Novel discrete-time recurrent neural networks handling discrete-form time-variant multi-augmented Sylvester matrix problems and manipulator application. IEEE Trans. Neural Netw. Learn. Syst. 33(2):587–599
Liao B, Zhang Y, Jin L (2016) Taylor \(O(h^{3})\) discretization of ZNN models for dynamic equality-constrained quadratic programming with application to manipulators. IEEE Trans Neural Netw Learn Syst 27(2):225–237
Liao S, Liu J, Qi Y, Huang H, Zheng R, Xiao X (2022) An adaptive gradient neural network to solve dynamic linear matrix equations. IEEE Trans, Syst, Man, Cybern, Syst 52(9):5913–5924
Liao S, Liu J, Xiao X, Fu D, Wang G, Jin L (2020) Modified gradient neural networks for solving the time-varying sylvester equation with adaptive coefficients and elimination of matrix inversion. Neurocomputing 379:1–11
Wang G, Hao Z, Li H, Zhang B (2023) An activated variable parameter gradient-based neural network for time-variant constrained quadratic programming and its applications. CAAI Trans Intell Technol, pp. 1–10, Feb
Li W, Han L, Xiao X et al (2022) A gradient-based neural network accelerated for vision-based control of an RCM-constrained surgical endoscope robot. Neural Comput Appl 34:1329–1343
Liufu Y, Jin L, Xu J, Xiao X, Fu D (2022) Reformative noise-immune neural network for equality-constrained optimization applied to image target detection. IEEE Trans Emerg Top Comput 10(2):973–984
Liu B, Fu D, Qi Y, Huang H, Jin L (2021) Noise-tolerant gradient-oriented neurodynamic model for solving the sylvester equation. Appl Soft Comput J, vol. 109
Jin L, Li S, Wang H, Zhang Z (2018) Nonconvex projection activated zeroing neurodynamic models for time-varying matrix pseudoinversion with accelerated finite-time convergence. Appl Soft Comput J 62:840–850
Jin L, Li S, Liao B, Zhang Z (2017) Zeroing neural networks: a survey. Neurocomputing 267:597–604
Zhang Y, Chen K, Tan H-Z (2009) Performance analysis of gradient neural network exploited for online Time-Varying matrix inversion. IEEE Trans Autom Control 54(8):1940–1945
Jin L, Wei L, Li S (2023) Gradient-based differential neural-solution to time-dependent nonlinear optimization. IEEE Trans Autom Control 68(1):620–627
Jarlebring E, Poloni F (2019) Iterative methods for the delay Lyapunov equation with T-Sylvester preconditioning. Appl Numer Math 135(1):173–185
Hunger R (2005) Floating point operations in matrix-vector calculus[M]. Munich, Germany: Munich University of Technology, Inst. for Circuit Theory and Signal Processing
Zuo Q, Li K, Xiao L, Wang Y, Li K (2021) On generalized zeroing neural network under discrete and distributed time delays and its application to dynamic Lyapunov equation. IEEE Trans Syst, Man, Cybern, Syst 52:5114–5126
Xiao L, Song W, Jia L, Li X (2022) ZNN for time-variant nonlinear inequality systems: A finite-time solution. Neurocomputing 500:319–328
Zhang Y, Li Z, Guo D, Chen K, Chen P (2013) Superior robustness of using power-sigmoid activation functions in Z-type models for time-varying problems solving. ICMLC., pp. 759–764
Zuo Q, Li K, Xiao L, Wang Y, Li K (2022) On generalized zeroing neural network under discrete and distributed time delays and its application to dynamic Lyapunov Equation. IEEE Trans Syst, Man, Cybernet: Syst 52(8):5114–5126. https://doi.org/10.1109/TSMC.2021.3115555
Download references
Acknowledgements
This research was funded in part by the National Key Research and Development Program of China under Grant No. 2022YFC3103101, Key Special Project for Introduced Talents Team of Southern Marine Science and Engineering Guangdong Laboratory under Contract GML2021GD0809, National Natural Science Foundation of China under Contract 42206187, Key projects of the Guangdong Education Department under Grant No. 2023ZDZX4009.
Author information
Authors and affiliations.
School of Electronic and Information Engineering, Guangdong Ocean University, Zhanjiang, 524088, China
Shangfeng Du, Dongyang Fu, Yang Si & Yongze Li
School of Information Science and Engineering, Lanzhou University, Lanzhou, 730000, China
You can also search for this author in PubMed Google Scholar
Corresponding author
Correspondence to Dongyang Fu .
Ethics declarations
Ethical approval.
We confirm that the manuscript has been read and approved by all named authors and that there are no other persons who satisfied the criteria for authorship but are not listed. We further confirm that the other of authors listed in the manuscript has been approved by all of us. We confirm that we have given due consideration to the protection of intellectual property associated with this work and that there are no impediments to publication, including the timing of publication, with respect to intellectual property. In so doing we confirm that we have followed the regulations of our institutions concerning intellectual property. We understand that the Corresponding Author is the sole contact for the Editorial process (including Editorial Manager and direct communications with the office). He is responsible for communicating with the other authors about progress, submissions of revision, and final approval of proof. We confirm that we have provided a current email address, which is accessible by the corresponding author, which has been configured to accept email from the Neural Computing and Applications Editorial Office.
Additional information
Publisher's note.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
Reprints and permissions
About this article
Du, S., Fu, D., Jin, L. et al. A zeroing feedback gradient-based neural dynamics model for solving dynamic quadratic programming problems with linear equation constraints in finite time. Neural Comput & Applic (2024). https://doi.org/10.1007/s00521-024-09762-3
Download citation
Received : 27 July 2023
Accepted : 25 March 2024
Published : 27 May 2024
DOI : https://doi.org/10.1007/s00521-024-09762-3
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- Zeroing feedback gradient-based neural dynamic (ZF-GND) model
- Nonlinear projection function
- Robotic motion planning
- Find a journal
- Publish with us
- Track your research
IMAGES
VIDEO
COMMENTS
CHAPTER 2 Solving Equations and Inequalities 84 University of Houston Department of Mathematics Additional Example 2: Solution: Additional Example 3: Solution: We first multiply both sides of the equation by 12 to clear the equation of fractions. Then solve as usual.
Equations Understand solving linear equations. • I can solve simple and multi-step equations. • I can describe how to solve equations. • I can analyze the measurements used to solve a problem and judge the level of accuracy appropriate for the solution. • I can apply equation-solving techniques to solve real-life problems. 1.1 Solving ...
Chapter 1: Linear Equations 1.1 Solving Linear Equations - One Step Equations Solving linear equations is an important and fundamental skill in algebra. In algebra, we are often presented with a problem where the answer is known, but part of the problem is missing. The missing part of the problem is what we seek to find.
In this unit we are going to be looking at simple equations in one variable, and the equations will be linear - that means there'll be no x2 terms and no x3's, just x's and numbers. For example, we will see how to solve the equation 3x+15 = x+25. 2. Solving equations by collecting terms Suppose we wish to solve the equation 3x+15 = x+25
Precalculus: Linear Equations Practice Problems 7. 9(x+3)−6 = 24−2x−3+11x 9x+27−6 = 21+9x 9x+21 = 21+9x 9x+21−9x = 21+9x−9x 21 = 21 We have to interpret what we have found. Since 21 is always equal to 21, the equation is true for any value of x that we try. Therefore, there are an infinite number of solutions. 8. y = −2x+1
Use linear equations to solve real-life problems. Solving Linear Equations by Adding or Subtracting An equation is a statement that two expressions are equal. A linear equation in one variable is an equation that can be written in the form ax + b = 0, where a and b are constants and a ≠ 0.
I. Linear Equations a. Definition: A linear equation in one unknown is an equation in which the only exponent on the unknown is 1. b. The General Form of a basic linear equation is: ax b c. c. To Solve: the goal is to write the equation in the form variable = constant. d. The solution to an equation is the set of all values that check in the ...
SOLVING LINEAR EQUATIONS Recall that whatever operation is performed on one side of the equation must also be performed on the other. Remember that when an equation involves fractions you can multiply both sides of the equation by the least common denominator and proceed as usual. Model Problems: Solve: 1. 8x 7 55 2. 2 17 3 1 y y 3.
tem of linear equations. Linear algebra arose from attempts to find systematic methods for solving these systems, so it is natural to begin this book by studying linear equations. If a, b, and c are real numbers, the graph of an equation of the form ax+by =c is a straight line (if a and b are not both zero), so such an equation is called a ...
Steps for Solving a Linear Equation in One Variable: Simplify both sides of the equation. Use the addition or subtraction properties of equality to collect the variable terms on one side of the equation and the constant terms on the other. Use the multiplication or division properties of equality to make the coefficient of the variable term ...
A linear equation is an algebraic equation with a degree of 1. This means that the highest exponent on any variable in the equation is 1. A . linear equation in one variable . can be written in the form . ax + b = c , where . a, b, and . c . are real numbers. General guidelines for solving linear equations in one variable: 1. Simplify anything ...
No solution. {−3} {−7} (1) Divide by 5 first, or (2) Distribute the 5 first. Create your own worksheets like this one with Infinite Algebra 2. Free trial available at KutaSoftware.com.
Find here an unlimited supply of printable worksheets for solving linear equations, available as both PDF and html files. You can customize the worksheets to include one-step, two-step, or multi-step equations, variable on both sides, parenthesis, and more. The worksheets suit pre-algebra and algebra 1 courses (grades 6-9).
Linear Equations in Two Variables In this chapter, we'll use the geometry of lines to help us solve equations. Linear equations in two variables If a, b,andr are real numbers (and if a and b are not both equal to 0) then ax+by = r is called a linear equation in two variables. (The "two variables" are the x and the y.)
What is most important is that they are e↵ective: they succeed in solving any linear equation. Let's apply these ideas to the equations of parts a through g of example 9. Example 9Solutions. a. 2(x +5) = 3x 1; Simplify the left side: 2x +10 = 3x 1; Subtract 2x from both sides: 10 = x 1; Add 1 to both sides: 11 = x.
Step 1: Notice that the coefi cients of the y-terms are opposites. So, you can add the equations to obtain an equation in one variable, x. 2x 14 Add the equations. Step 2: Solve for x. x 7 Divide each side by 2. Step 3: Substitute 7 for x in one of the original equations and solve for y. 7 3y 2 Substitute 7 for .
Solution: Translating the problem into an algebraic equation gives: 2x − 5 = 13 2 x − 5 = 13. We solve this for x x. First, add 5 to both sides. 2x = 13 + 5, so that 2x = 18 2 x = 13 + 5, so that 2 x = 18. Dividing by 2 gives x = 182 = 9 x = 18 2 = 9. c) A number subtracted from 9 is equal to 2 times the number.
8.1 - Solve Equations using the Subtraction and Addition Properties of Equality. In the following exercises, determine whether the given number is a solution to the equation. x + 16 = 31, x = 15. w − 8 = 5, w = 3. −9n = 45, n = 54. 4a = 72, a = 18. In the following exercises, solve the equation using the Subtraction Property of Equality.
this section we solve systems of linear equations in two variables and use systems to solve problems. Solving a System by Graphing Because the graph of each linear equation is a line, points that satisfy both equations lie on both lines. For some systems these points can be found by graphing. EXAMPLE 1 A system with only one solution
This topic covers: - Intercepts of linear equations/functions - Slope of linear equations/functions - Slope-intercept, point-slope, & standard forms - Graphing linear equations/functions - Writing linear equations/functions - Interpreting linear equations/functions - Linear equations/functions word problems
So for the rectangle of length 8 and width 3 the formula would give, P =2(8) +2(3) = 16 + 6= 22. With problems that we will consider here the formula P =2L +2W will be used. Example 7. 4. The perimeter of a rectangle is 44. The length is 5 less than double the width. Find the dimensions.
14 Chapter 1 Solving Linear Equations Solving Real-Life Problems Modeling with Mathematics Use the table to fi nd the number of miles x you need to bike on Friday so that the mean number of miles biked per day is 5. SOLUTION 1. Understand the Problem You know how many miles you biked Monday through Thursday. You are asked to fi nd the number
A hybrid analytical method for solving linear and nonlinear fractional partial differential equations is presented. The proposed analytical approach is an elegant combination of the Natural Transform Method (NTM) and a well-known method, Homotopy Perturbation Method (HPM).
This paper briefly examines how literature addresses the numerical solution of partial differential equations by the spectral Tau method. It discusses the implementation of such a numerical solution for PDE's presenting the construction of the problem's algebraic representation and exploring solution mechanisms with different orthogonal polynomial bases. It highlights contexts of ...
Study is devoted to solving dynamics quadratic programming (DQP) problems with linear equation constraints, and a zeroing feedback GND model (ZF-GND) is proposed. The ZF-GND model introduces a time-varying term based on the GND model, which can eliminate the time delay problem in the computation of the GND model and enables the model to obtain ...